
ਇਹ ਪ੍ਰੋਜੈਕਟ ਦੱਸਦਾ ਹੈ ਕਿ ਕਿਵੇਂ ਇੱਕ DC ਮੋਟਰ ਨੂੰ ਇੱਕ ਟੀਵੀ ਜਾਂ DVD ਰਿਮੋਟ ਕੰਟਰੋਲ ਦੀ ਵਰਤੋਂ ਕਰਕੇ ਅੱਗੇ ਜਾਂ ਉਲਟ ਦਿਸ਼ਾ ਵਿੱਚ ਭੇਜਿਆ ਜਾ ਸਕਦਾ ਹੈ।ਟੀਚਾ ਇੱਕ ਸਧਾਰਨ ਦੋ-ਦਿਸ਼ਾਵੀ ਮੋਟਰ ਡ੍ਰਾਈਵਰ ਦਾ ਨਿਰਮਾਣ ਕਰਨਾ ਹੈ ਜੋ ਮਾਡਿਊਲੇਟਿਡ ਇਨਫਰਾਰੈੱਡ (IR) 38kHz ਪਲਸ ਟਰੇਨ ਦੀ ਵਰਤੋਂ ਬਿਨਾਂ ਕਿਸੇ ਮਾਈਕ੍ਰੋਕੰਟਰੋਲਰ ਜਾਂ ਪ੍ਰੋਗਰਾਮਿੰਗ ਦੀ ਵਰਤੋਂ ਕਰਦੇ ਹੋਏ ਕਰਦਾ ਹੈ।
ਲੇਖਕ ਦਾ ਪ੍ਰੋਟੋਟਾਈਪ ਚਿੱਤਰ 1 ਵਿੱਚ ਦਿਖਾਇਆ ਗਿਆ ਹੈ।

ਸਰਕਟ ਅਤੇ ਕੰਮ
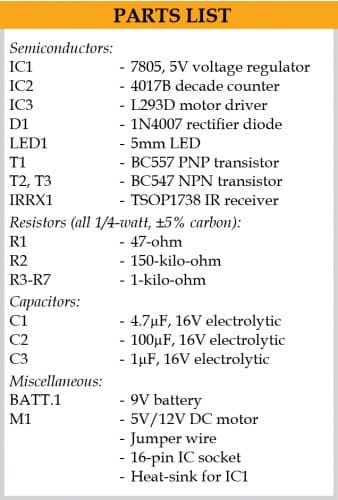
ਪ੍ਰੋਜੈਕਟ ਦਾ ਸਰਕਟ ਡਾਇਗਰਾਮ ਚਿੱਤਰ 2 ਵਿੱਚ ਦਿਖਾਇਆ ਗਿਆ ਹੈ। ਇਹ IR ਰਿਸੀਵਰ ਮੋਡੀਊਲ TSOP1738 (IRRX1), ਦਹਾਕੇ ਕਾਊਂਟਰ 4017B (IC2), ਮੋਟਰ ਡਰਾਈਵਰ L293D (IC3), PNP ਟਰਾਂਜ਼ਿਸਟਰ BC557 (T1), ਦੋ BC547 NPN ਟਰਾਂਜ਼ਿਸਟਰ ( T2 ਅਤੇ T3), 5V ਰੈਗੂਲੇਟਿਡ ਪਾਵਰ ਸਪਲਾਈ (IC1), ਅਤੇ ਇੱਕ 9V ਬੈਟਰੀ।
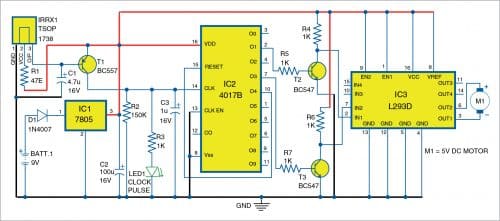
ਪ੍ਰੋਜੈਕਟ ਲਈ ਲੋੜੀਂਦਾ 5V DC ਜਨਰੇਟ ਕਰਨ ਲਈ 9V ਬੈਟਰੀ ਡਾਇਓਡ D1 ਦੁਆਰਾ ਵੋਲਟੇਜ ਰੈਗੂਲੇਟਰ 7805 ਨਾਲ ਜੁੜੀ ਹੋਈ ਹੈ।Capacitor C2 (100µF, 16V) ਰਿਪਲ ਅਸਵੀਕਾਰ ਕਰਨ ਲਈ ਵਰਤਿਆ ਜਾਂਦਾ ਹੈ।
ਆਮ ਸਥਿਤੀ ਵਿੱਚ, IR ਮੋਡੀਊਲ IRRX1 ਦਾ ਆਉਟਪੁੱਟ ਪਿੰਨ 3 ਤਰਕ ਉੱਚ 'ਤੇ ਹੈ, ਜਿਸਦਾ ਮਤਲਬ ਹੈ ਕਿ ਇਸ ਨਾਲ ਜੁੜਿਆ ਟਰਾਂਜ਼ਿਸਟਰ T1 ਕੱਟਿਆ ਹੋਇਆ ਹੈ ਅਤੇ ਇਸ ਲਈ ਇਸਦਾ ਕੁਲੈਕਟਰ ਟਰਮੀਨਲ ਤਰਕ ਘੱਟ ਹੈ।T1 ਦਾ ਕੁਲੈਕਟਰ ਦਹਾਕੇ ਦੇ ਕਾਊਂਟਰ IC2 ਦੀ ਘੜੀ ਦੀ ਨਬਜ਼ ਚਲਾਉਂਦਾ ਹੈ।
ਰਿਮੋਟ ਨੂੰ IR ਮੋਡੀਊਲ ਵੱਲ ਇਸ਼ਾਰਾ ਕਰਨ ਅਤੇ ਕਿਸੇ ਵੀ ਕੁੰਜੀ ਨੂੰ ਦਬਾਉਣ 'ਤੇ, ਮੋਡੀਊਲ ਰਿਮੋਟ ਕੰਟਰੋਲ ਤੋਂ 38kHz IR ਪਲਸ ਪ੍ਰਾਪਤ ਕਰਦਾ ਹੈ।ਇਹ ਦਾਲਾਂ T1 ਦੇ ਕੁਲੈਕਟਰ 'ਤੇ ਉਲਟੀਆਂ ਹੁੰਦੀਆਂ ਹਨ ਅਤੇ ਡੀਕੇਡ ਕਾਊਂਟਰ IC2 ਦੇ ਕਲਾਕ ਇਨਪੁਟ ਪਿੰਨ 14 ਨੂੰ ਦਿੱਤੀਆਂ ਜਾਂਦੀਆਂ ਹਨ।
ਪਹੁੰਚਣ ਵਾਲੀਆਂ IR ਦਾਲਾਂ ਉਸੇ ਦਰ (38kHz) 'ਤੇ ਦਹਾਕੇ ਦੇ ਕਾਊਂਟਰ ਨੂੰ ਵਧਾਉਂਦੀਆਂ ਹਨ ਪਰ IC2 ਦੇ ਕਲਾਕ ਇਨਪੁਟ ਪਿੰਨ 14 'ਤੇ RC ਫਿਲਟਰ (R2=150k ਅਤੇ C3=1µF) ਦੀ ਮੌਜੂਦਗੀ ਕਾਰਨ, ਦਾਲਾਂ ਦੀ ਰੇਲਗੱਡੀ ਇੱਕ ਸਿੰਗਲ ਪਲਸ ਦੇ ਰੂਪ ਵਿੱਚ ਦਿਖਾਈ ਦਿੰਦੀ ਹੈ। ਕਾਊਂਟਰਇਸ ਤਰ੍ਹਾਂ, ਹਰੇਕ ਕੁੰਜੀ ਨੂੰ ਦਬਾਉਣ 'ਤੇ, ਕਾਊਂਟਰ ਸਿਰਫ ਇੱਕ ਗਿਣਤੀ ਦੁਆਰਾ ਅੱਗੇ ਵਧਦਾ ਹੈ।
ਜਦੋਂ ਰਿਮੋਟ ਦੀ ਕੁੰਜੀ ਜਾਰੀ ਕੀਤੀ ਜਾਂਦੀ ਹੈ, ਤਾਂ ਕੈਪੇਸੀਟਰ C3 ਰੋਧਕ R2 ਦੁਆਰਾ ਡਿਸਚਾਰਜ ਹੁੰਦਾ ਹੈ ਅਤੇ ਘੜੀ ਦੀ ਲਾਈਨ ਜ਼ੀਰੋ ਹੋ ਜਾਂਦੀ ਹੈ।ਇਸ ਲਈ ਹਰ ਵਾਰ ਜਦੋਂ ਉਪਭੋਗਤਾ ਰਿਮੋਟ 'ਤੇ ਇੱਕ ਕੁੰਜੀ ਨੂੰ ਦਬਾਉ ਅਤੇ ਜਾਰੀ ਕਰਦਾ ਹੈ, ਤਾਂ ਕਾਊਂਟਰ ਆਪਣੇ ਕਲਾਕ ਇਨਪੁਟ 'ਤੇ ਇੱਕ ਪਲਸ ਪ੍ਰਾਪਤ ਕਰਦਾ ਹੈ ਅਤੇ ਇਹ ਪੁਸ਼ਟੀ ਕਰਨ ਲਈ LED1 ਚਮਕਦਾ ਹੈ ਕਿ ਨਬਜ਼ ਪ੍ਰਾਪਤ ਹੋ ਗਈ ਹੈ।
ਓਪਰੇਸ਼ਨ ਦੌਰਾਨ ਪੰਜ ਸੰਭਾਵਨਾਵਾਂ ਹੋ ਸਕਦੀਆਂ ਹਨ:
ਕੇਸ 1
ਜਦੋਂ ਰਿਮੋਟ ਦੀ ਕੁੰਜੀ ਦਬਾਈ ਜਾਂਦੀ ਹੈ, ਪਹਿਲੀ ਪਲਸ ਆਉਂਦੀ ਹੈ ਅਤੇ ਦਹਾਕੇ ਕਾਊਂਟਰ (IC2) ਦਾ O0 ਆਉਟਪੁੱਟ ਉੱਚਾ ਹੁੰਦਾ ਹੈ ਜਦੋਂ ਕਿ ਪਿੰਨ O1 ਤੋਂ O9 ਘੱਟ ਹੁੰਦੇ ਹਨ, ਜਿਸਦਾ ਮਤਲਬ ਹੈ ਕਿ ਟਰਾਂਜ਼ਿਸਟਰ T2 ਅਤੇ T3 ਕੱਟ-ਆਫ ਅਵਸਥਾ ਵਿੱਚ ਹੁੰਦੇ ਹਨ।ਦੋਨਾਂ ਟਰਾਂਜ਼ਿਸਟਰਾਂ ਦੇ ਕੁਲੈਕਟਰਾਂ ਨੂੰ 1-ਕਿਲੋ-ਓਹਮ ਰੋਧਕਾਂ (R4 ਅਤੇ R6) ਦੁਆਰਾ ਉੱਚੀ ਅਵਸਥਾ ਵਿੱਚ ਖਿੱਚਿਆ ਜਾਂਦਾ ਹੈ, ਇਸਲਈ ਮੋਟਰ ਡਰਾਈਵਰ L293D (IC3) ਦੇ ਦੋਵੇਂ ਇਨਪੁਟ ਟਰਮੀਨਲ IN1 ਅਤੇ IN2 ਉੱਚੇ ਹੋ ਜਾਂਦੇ ਹਨ।ਇਸ ਪੜਾਅ 'ਤੇ, ਮੋਟਰ ਬੰਦ ਸਥਿਤੀ ਵਿੱਚ ਹੈ।
ਕੇਸ 2
ਜਦੋਂ ਇੱਕ ਕੁੰਜੀ ਨੂੰ ਦੁਬਾਰਾ ਦਬਾਇਆ ਜਾਂਦਾ ਹੈ, ਤਾਂ CLK ਲਾਈਨ 'ਤੇ ਪਹੁੰਚਣ ਵਾਲੀ ਦੂਜੀ ਪਲਸ ਕਾਊਂਟਰ ਨੂੰ ਇੱਕ ਕਰਕੇ ਵਧਾ ਦਿੰਦੀ ਹੈ।ਭਾਵ, ਜਦੋਂ ਦੂਜੀ ਪਲਸ ਆਉਂਦੀ ਹੈ, ਤਾਂ IC2 ਦਾ O1 ਆਉਟਪੁੱਟ ਵੱਧ ਜਾਂਦਾ ਹੈ, ਜਦੋਂ ਕਿ ਬਾਕੀ ਆਊਟਪੁੱਟ ਘੱਟ ਹੁੰਦੇ ਹਨ।ਇਸ ਲਈ, ਟਰਾਂਜ਼ਿਸਟਰ T2 ਚਲਾਉਂਦਾ ਹੈ ਅਤੇ T3 ਕੱਟ-ਆਫ ਹੁੰਦਾ ਹੈ।ਜਿਸਦਾ ਮਤਲਬ ਹੈ ਕਿ T2 ਦੇ ਕੁਲੈਕਟਰ 'ਤੇ ਵੋਲਟੇਜ ਘੱਟ ਜਾਂਦੀ ਹੈ (IC3 ਦਾ IN1) ਅਤੇ T3 ਦੇ ਕੁਲੈਕਟਰ 'ਤੇ ਵੋਲਟੇਜ ਉੱਚੀ ਹੋ ਜਾਂਦੀ ਹੈ (IC3 ਦਾ IN2) ਅਤੇ ਮੋਟਰ ਡਰਾਈਵਰ IC3 ਦੇ ਇਨਪੁਟਸ IN1 ਅਤੇ IN2 ਕ੍ਰਮਵਾਰ 0 ਅਤੇ 1 ਬਣ ਜਾਂਦੇ ਹਨ।ਇਸ ਸਥਿਤੀ ਵਿੱਚ, ਮੋਟਰ ਅੱਗੇ ਦੀ ਦਿਸ਼ਾ ਵਿੱਚ ਘੁੰਮਦੀ ਹੈ।
ਕੇਸ 3
ਜਦੋਂ ਇੱਕ ਕੁੰਜੀ ਨੂੰ ਇੱਕ ਵਾਰ ਫਿਰ ਦਬਾਇਆ ਜਾਂਦਾ ਹੈ, ਤਾਂ CLK ਲਾਈਨ 'ਤੇ ਪਹੁੰਚਣ ਵਾਲੀ ਤੀਜੀ ਪਲਸ ਕਾਊਂਟਰ ਨੂੰ ਇੱਕ ਵਾਰ ਫਿਰ ਵਧਾ ਦਿੰਦੀ ਹੈ।ਇਸ ਲਈ IC2 ਦਾ O2 ਆਉਟਪੁੱਟ ਵੱਧ ਜਾਂਦਾ ਹੈ।ਜਿਵੇਂ ਕਿ O2 ਪਿੰਨ ਨਾਲ ਕੁਝ ਵੀ ਜੁੜਿਆ ਨਹੀਂ ਹੈ ਅਤੇ ਆਉਟਪੁੱਟ ਪਿੰਨ O1 ਅਤੇ O3 ਘੱਟ ਹਨ, ਇਸਲਈ ਦੋਵੇਂ ਟਰਾਂਜ਼ਿਸਟਰ T2 ਅਤੇ T3 ਕੱਟ-ਆਫ ਸਥਿਤੀ ਵਿੱਚ ਜਾਂਦੇ ਹਨ।
ਦੋਵਾਂ ਟਰਾਂਜ਼ਿਸਟਰਾਂ ਦੇ ਕੁਲੈਕਟਰ ਟਰਮੀਨਲਾਂ ਨੂੰ 1-ਕਿਲੋ-ਓਹਮ ਰੋਧਕ R4 ਅਤੇ R6 ਦੁਆਰਾ ਉੱਚੀ ਅਵਸਥਾ ਵਿੱਚ ਖਿੱਚਿਆ ਜਾਂਦਾ ਹੈ, ਜਿਸਦਾ ਮਤਲਬ ਹੈ ਕਿ IC3 ਦੇ ਇਨਪੁਟ ਟਰਮੀਨਲ IN1 ਅਤੇ IN2 ਉੱਚੇ ਹੋ ਜਾਂਦੇ ਹਨ।ਇਸ ਪੜਾਅ 'ਤੇ, ਮੋਟਰ ਦੁਬਾਰਾ ਬੰਦ ਸਥਿਤੀ ਵਿੱਚ ਹੈ।
ਕੇਸ 4
ਜਦੋਂ ਇੱਕ ਕੁੰਜੀ ਨੂੰ ਇੱਕ ਵਾਰ ਫਿਰ ਦਬਾਇਆ ਜਾਂਦਾ ਹੈ, ਤਾਂ CLK ਲਾਈਨ 'ਤੇ ਪਹੁੰਚਣ ਵਾਲੀ ਚੌਥੀ ਪਲਸ ਚੌਥੀ ਵਾਰ ਕਾਊਂਟਰ ਨੂੰ ਇੱਕ ਕਰਕੇ ਵਧਾ ਦਿੰਦੀ ਹੈ।ਹੁਣ IC2 ਦਾ O3 ਆਉਟਪੁੱਟ ਵੱਧ ਜਾਂਦਾ ਹੈ, ਜਦੋਂ ਕਿ ਬਾਕੀ ਦੇ ਆਉਟਪੁੱਟ ਘੱਟ ਹੁੰਦੇ ਹਨ, ਇਸਲਈ ਟਰਾਂਜ਼ਿਸਟਰ T3 ਚਲਾਉਂਦਾ ਹੈ।ਜਿਸਦਾ ਮਤਲਬ ਹੈ ਕਿ T2 ਦੇ ਕੁਲੈਕਟਰ 'ਤੇ ਵੋਲਟੇਜ ਉੱਚ (IC3 ਦਾ IN1) ਅਤੇ T3 ਦੇ ਕੁਲੈਕਟਰ 'ਤੇ ਵੋਲਟੇਜ ਘੱਟ (IC3 ਦਾ IN2) ਬਣ ਜਾਂਦਾ ਹੈ।ਇਸ ਲਈ, IC3 ਦੇ ਇਨਪੁਟਸ IN1 ਅਤੇ IN2 ਕ੍ਰਮਵਾਰ 1 ਅਤੇ 0 ਪੱਧਰਾਂ 'ਤੇ ਹਨ।ਇਸ ਸਥਿਤੀ ਵਿੱਚ, ਮੋਟਰ ਉਲਟ ਦਿਸ਼ਾ ਵਿੱਚ ਘੁੰਮਦੀ ਹੈ।
ਕੇਸ 5
ਜਦੋਂ ਇੱਕ ਕੁੰਜੀ ਨੂੰ ਪੰਜਵੀਂ ਵਾਰ ਦਬਾਇਆ ਜਾਂਦਾ ਹੈ, ਤਾਂ CLK ਲਾਈਨ 'ਤੇ ਪਹੁੰਚਣ ਵਾਲੀ ਪੰਜਵੀਂ ਪਲਸ ਕਾਊਂਟਰ ਨੂੰ ਇੱਕ ਵਾਰ ਫਿਰ ਵਧਾ ਦਿੰਦੀ ਹੈ।ਕਿਉਂਕਿ O4 (IC2 ਦਾ ਪਿੰਨ 10) IC2 ਦੇ ਇਨਪੁਟ ਪਿੰਨ 15 ਨੂੰ ਰੀਸੈਟ ਕਰਨ ਲਈ ਵਾਇਰ ਕੀਤਾ ਗਿਆ ਹੈ, ਪੰਜਵੀਂ ਵਾਰ ਦਬਾਉਣ ਨਾਲ ਦਹਾਕੇ ਕਾਊਂਟਰ IC ਨੂੰ O0 ਹਾਈ ਦੇ ਨਾਲ ਪਾਵਰ-ਆਨ-ਰੀਸੈਟ ਸਥਿਤੀ ਵਿੱਚ ਵਾਪਸ ਲਿਆ ਜਾਂਦਾ ਹੈ।
ਇਸ ਤਰ੍ਹਾਂ, ਸਰਕਟ ਇੱਕ ਦੋ-ਦਿਸ਼ਾਵੀ ਮੋਟਰ ਡਰਾਈਵਰ ਵਜੋਂ ਕੰਮ ਕਰਦਾ ਹੈ ਜੋ ਇੱਕ ਇਨਫਰਾਰੈੱਡ ਰਿਮੋਟ ਕੰਟਰੋਲ ਨਾਲ ਨਿਯੰਤਰਿਤ ਹੁੰਦਾ ਹੈ।
ਉਸਾਰੀ ਅਤੇ ਟੈਸਟਿੰਗ
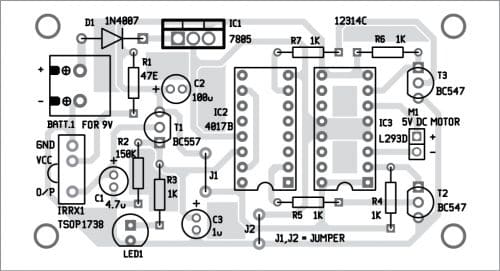
ਸਰਕਟ ਨੂੰ ਵੇਰੋਬੋਰਡ ਜਾਂ ਪੀਸੀਬੀ 'ਤੇ ਅਸੈਂਬਲ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ ਜਿਸਦਾ ਅਸਲ-ਆਕਾਰ ਲੇਆਉਟ ਚਿੱਤਰ 3 ਵਿੱਚ ਦਿਖਾਇਆ ਗਿਆ ਹੈ। PCB ਲਈ ਕੰਪੋਨੈਂਟਸ ਲੇਆਉਟ ਚਿੱਤਰ 4 ਵਿੱਚ ਦਿਖਾਇਆ ਗਿਆ ਹੈ।
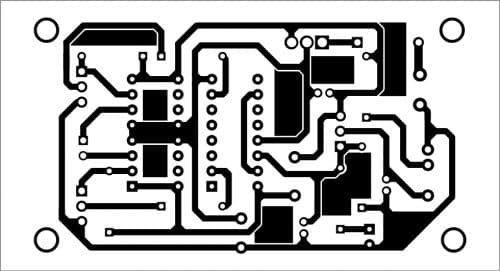
ਪੀਸੀਬੀ ਅਤੇ ਕੰਪੋਨੈਂਟ ਲੇਆਉਟ PDF ਡਾਊਨਲੋਡ ਕਰੋ:ਇੱਥੇ ਕਲਿੱਕ ਕਰੋ
ਸਰਕਟ ਨੂੰ ਅਸੈਂਬਲ ਕਰਨ ਤੋਂ ਬਾਅਦ, 9V ਬੈਟਰੀ ਨੂੰ BATT.1 ਵਿੱਚ ਜੋੜੋ।ਸੰਚਾਲਨ ਲਈ ਸੱਚਾਈ ਸਾਰਣੀ (ਸਾਰਣੀ 1) ਵੇਖੋ ਅਤੇ ਉਪਰੋਕਤ ਕੇਸ 1 ਤੋਂ ਲੈ ਕੇ ਕੇਸ 5 ਵਿੱਚ ਦੱਸੇ ਗਏ ਕਦਮਾਂ ਦੀ ਪਾਲਣਾ ਕਰੋ।
ਲੀਜ਼ਾ ਦੁਆਰਾ ਸੰਪਾਦਿਤ
ਪੋਸਟ ਟਾਈਮ: ਸਤੰਬਰ-29-2021